| 功能设计 | 详细说明 |
| 工作模式 | 正常风 自然风:忽大忽小间隔 15 秒 睡眠风:每隔一小时自动降档,最后降到最低档 |
| 风速控制 | 编码器旋转控制风扇,顺时针旋转风速 +,逆时针旋转风速 - |
| 模式切换 | 编码器按钮短按切换模式。 |
| 本地定时 | 定时结束后自动关机,定时按键:无定时 -> 1 小时 -> 2 小时 -> 3 小时 -> 4 小时 -> 无定时。 |
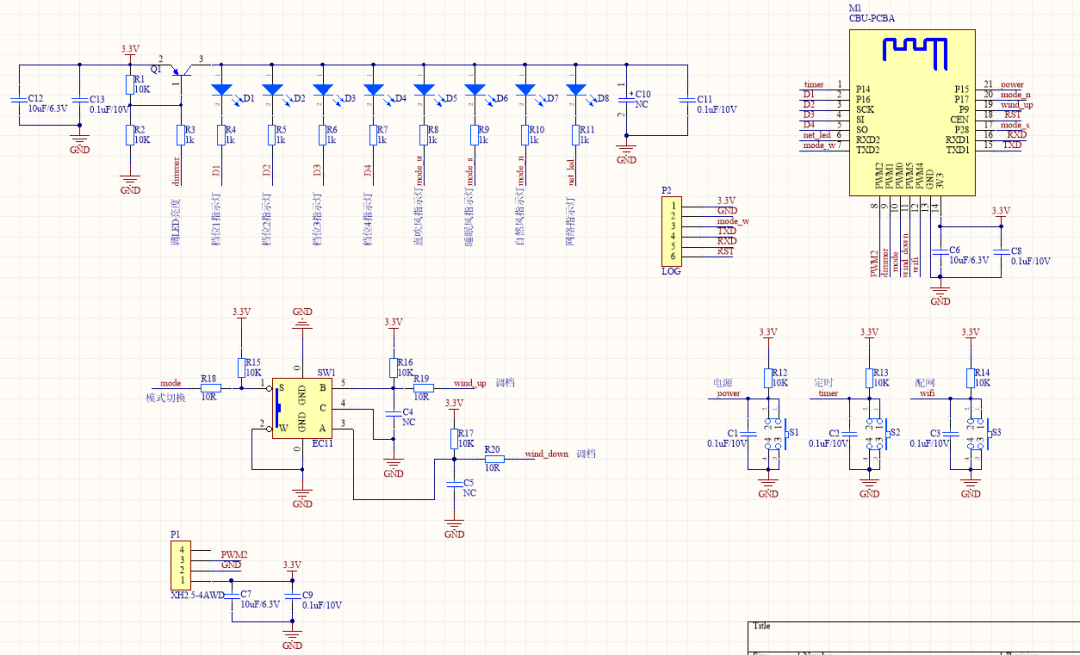
| 指示灯显示 1 | 4 颗指示灯显示风速,4 颗指示灯指示 8 档风速,闪烁代表 1 档,常亮代表 2 档。4 颗指示灯还复用本地定时指示。 |
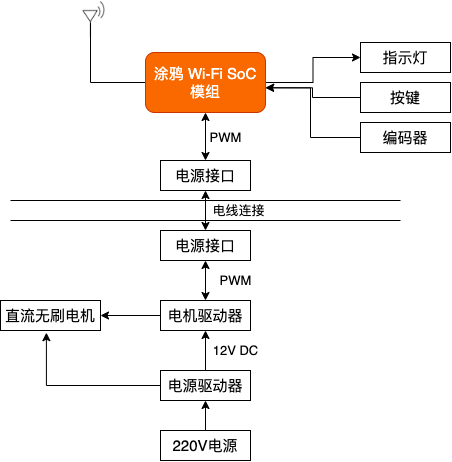
| 指示灯显示 2 | LED 有 8 颗,除指示风速 4 颗 LED 外,还有 4 颗指示灯。一颗 Wi-Fi 指示灯,指示 Wi-Fi 状态;其他三颗指示当前风扇模式。 |
| 电源 | 电源按键,控制风扇的启动和断电状态 |
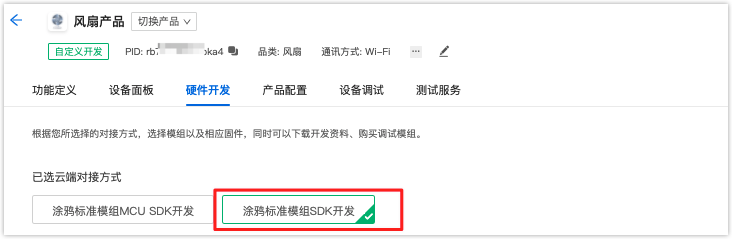
| 设备配网 | 长按 Wi-Fi 按键,设备进入配网模式 |
void key_rotary_task(void)
{
INT8_T current_gear;
while(1) {
//得到当前档位
current_gear = get_cur_gear();
if((tuya_gpio_read(KEY_ROTARY_A) == FALSE) && (fan_state.on_off != FALSE)) {
while(tuya_gpio_read(KEY_ROTARY_A) == FALSE);
if(tuya_gpio_read(KEY_ROTARY_A) != tuya_gpio_read(KEY_ROTARY_B)) {
PR_NOTICE("A != B"); //顺时针方向
current_gear++;
if (current_gear > (MAX_GEAR_NUMBER-1)) {
current_gear = (MAX_GEAR_NUMBER-1);
}
fan_state.speed = g_fan_speed_gear[current_gear];
} else {
PR_NOTICE("A == B"); //逆时针方向
current_gear--;
if (current_gear < 0) {
current_gear = 0;
}
fan_state.speed = g_fan_speed_gear[current_gear];
}
/* 改变风扇状态:风速,模式,LED */
change_fan_state();
write_flash_fan_state();
PR_NOTICE("fan current_gear is : %d", current_gear);
}
tuya_hal_system_sleep(50);
}
}
//在初始化函数里创建任务
VOID_T fan_key_init(VOID_T)
{
......
tuya_hal_thread_create(NULL, "key_rotary_task", 512*4, TRD_PRIO_5, key_rotary_task, NULL);
}
/**
* @Function: hw_report_all_dp_status
* @Description: 上报所有 dp 点
* @Input: none
* @Output: none
* @Return: none
* @Others:
*/
VOID_T hw_report_all_dp_status(VOID_T)
{
OPERATE_RET op_ret = OPRT_OK;
INT_T dp_cnt = 0;
dp_cnt = 4;
/* 没有连接到路由器,退出 */
GW_WIFI_NW_STAT_E wifi_state = STAT_LOW_POWER;
get_wf_gw_nw_status(&wifi_state);
if (wifi_state <= STAT_AP_STA_DISC || wifi_state == STAT_STA_DISC) {
return;
}
TY_OBJ_DP_S *dp_arr = (TY_OBJ_DP_S *)Malloc(dp_cnt*SIZEOF(TY_OBJ_DP_S));
if(NULL == dp_arr) {
PR_ERR("malloc failed");
return;
}
memset(dp_arr, 0, dp_cnt*SIZEOF(TY_OBJ_DP_S));
dp_arr[0].dpid = fan_state.dp_id_switch;
dp_arr[0].type = PROP_BOOL;
dp_arr[0].time_stamp = 0;
dp_arr[0].value.dp_bool = fan_state.on_off;
dp_arr[1].dpid = fan_state.dp_id_mode;
dp_arr[1].type = PROP_ENUM;
dp_arr[1].time_stamp = 0;
dp_arr[1].value.dp_enum = fan_state.mode;
dp_arr[2].dpid = fan_state.dp_id_speed;
dp_arr[2].type = PROP_VALUE;
dp_arr[2].time_stamp = 0;
dp_arr[2].value.dp_value = fan_state.speed;
dp_arr[3].dpid = fan_state.dp_id_bright;
dp_arr[3].type = PROP_VALUE;
dp_arr[3].time_stamp = 0;
dp_arr[3].value.dp_value = fan_state.bright;
op_ret = dev_report_dp_json_async(NULL ,dp_arr,dp_cnt);
Free(dp_arr);
if(OPRT_OK != op_ret) {
PR_ERR("dev_report_dp_json_async relay_config data error,err_num",op_ret);
}
PR_DEBUG("dp_query report_all_dp_data");
}
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。